Frames and Finite Dimensionality:
Frame Transformation, Classification and Algorithms
created: 09/05/2006; last update:
03/12/2015
Update 2015:
The topic of frames in finite dimensional spaces is treated in much more details in
The implementation for general frames can be found in
The frame concept is used in LTFAT with an object-oriented approach, see the documentation.
This webpage is linked to the paper
Codes (MATLAB):
- Build the synthesis matrix for the canonical dual frame: candualframe(D)
- Build the synthesis matrix for the canonical tight frame: cantightframe(D)
- Cross-Gram Matrix of two sequences: CrossGram(D1,D2)
- Calculate the framebounds of a frame: framebounds(D)
- Create random frame (in the unit circle): RandFrame(dim,M)
- Plot 2- and 3-dimensional frame: PlotFrame(D)
- Script for testing the frame transformation using stochastic
parameters: testframtrans2
- Script for testing the frame transformation using fixed frames: testframtrans
- Arrowline 2-D and 3-D vector plot allowing colors and
annotations: vectarrowxxl(p0,p1) [based on external code vectarrow(p0,p1)].
- All codes collected in one ZIP-file.
Pictures:
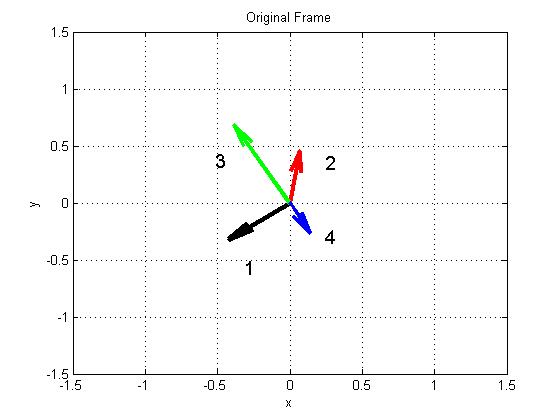
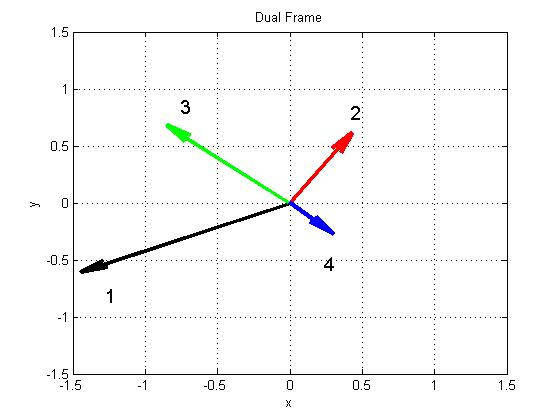
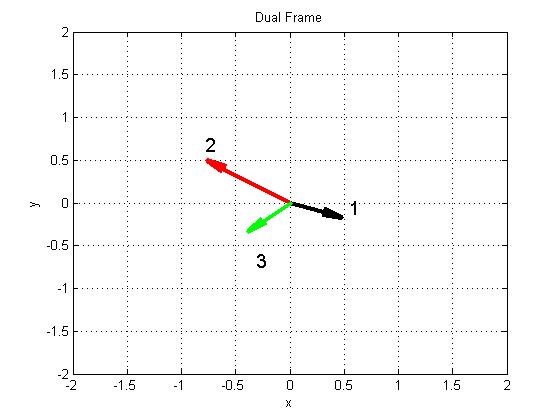
- Representation of the vectors of the frame (left) and its dual
(right) of Example 3.1
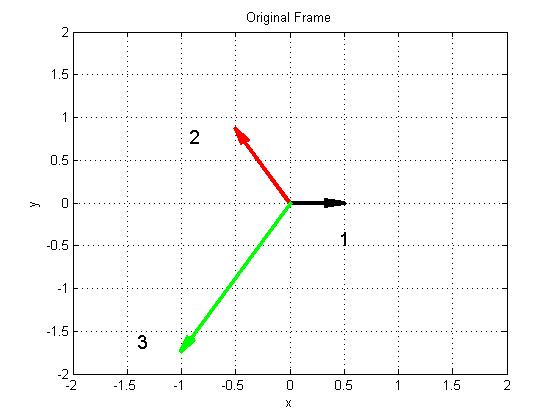
- Representation of the vectors of the frame (left) and its dual
(right) of Example 3.2
 R
R
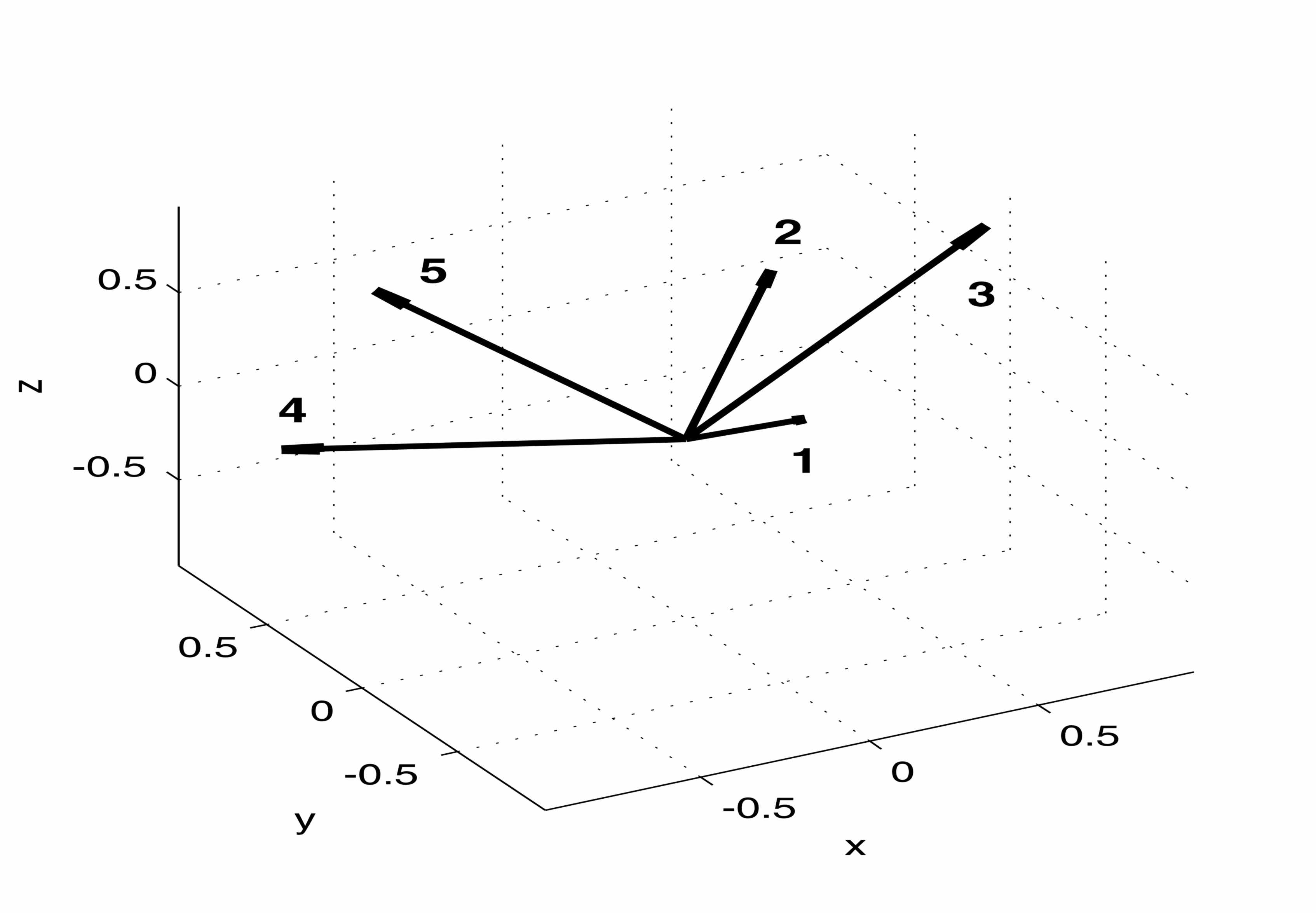
- Representation of the vectors of the frame (left) and its dual
(right) of Example 3.3 (numbers were manually added).

{kind=link}